UFO JOE: How much kinetic energy can be generated?
Background:


The Next Step - UFO JOE:

Ever since my first modified Fingertech wedge kit had it's poorly designed wedge ripped off in a very one sided finals match I've wanted to design a robot that generated as much kinetic energy as feasibly possible. Inspired by the idea that I could design something like Deep Six on my first attempt I put together Vertical Spinner Prototype, a robot that tore itself to shreds the second it made contact with metal.

Vertical Spinner Prototype
Moving on to a more stable build, Pulsar was designed to be a much more compact and controllable version of VSP. Focusing more on a Witch Doctor-esque structure, Pulsar was a lot more mechanically stable, and was able to deliver hits that I hoped VSP would be able to manage. This has made it my main robot, and it's been relatively successful at events.
Pulsar v. Werewolf
Most recently, I've tried my hand at a horizontal spinner, hoping that I could avoid the annoying forces that often leave me slamming Pulsar into walls hoping to self right. While still in development due to weight difficulties, Concorde features a weapon blade that takes up about a third of the robot's mass, which is spread out to maximize strength and moment of inertia (a physical property of rotating objects that allows them to store more energy). It should be fully operational once new drive motors are installed.

Concorde

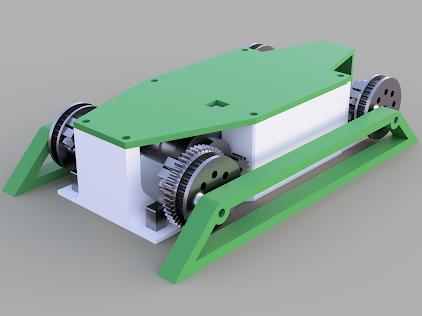
Early Stages of UFO JOE
As you can see in this rough design, UFO JOE is an attempt to maximize the kinetic energy available in a beetleweight through a variety of tactics. The disk features no steel in the center of the robot, ensuring the moment of inertia is maximized for the mass taken up. The large radius of 265.165 mm (10.44 in) will amplify this effect as well as boost the weapon's tip speed. Additionally, the singular tooth ensures that all this energy will be transferred as much as possible. But the most important feature of the robot is the weapon's weight, approximately three and a half pounds, in a three pound weight class.
This extreme weapon weight will have to be achieved by utilizing the walker rules that most combat robot events allow, where a robot that walks, instead of moving with the traditional wheel setup, gets an additional three pounds of weight. This is the only step I could take if I wanted to see how much kinetic energy a beetleweight could generate. The focus of the next post on UFO JOE will be the walking mechanism housed inside, and the theory behind the way it functions.
Comments
Post a Comment