UFO JOE: The First Steps

3D Printed Chassis and Walking Mechanism
After receiving all the mechanical parts from ServoCity and 3D printing the chassis and legs I was ready to finally test the theory behind UFO JOE. If this walking mechanism worked it would mean that I could finally start to properly design the full body spinner. Now this wouldn't be a perfect demonstration of the walking mechanism, as the drive motor needs to be exchanged for a brushless system, and the front and back legs need to be linked with pullies. I will go over how these affected the walking later in the post. For more details on the walking mechanism check out my last post on UFO JOE.
UFO JOE Takes It's First Steps
Video Demonstrating The Back Axle Rocking
Now for the problems. In the video you can see the back axle of the legs rocking back and forth through the lower half of the rotation instead of completing it fully. To combat this, the design of the walking mechanism included belts and pullies to properly convert the angular motion of the front axle to the back. However, I hadn't ordered the belts yet. Without the belts, the only way for the motion of the walker to be translated to the back is through the pushing and pulling of the legs horizontally. This means that the rotation of the back axle can only occur through the torque created by this horizontal force.

Diagram Showing The Change In Force Strength Through A Rotation

Torque Equation Demonstration
UFO JOE Heavy Weight Test
I discovered the last issue with the current design during the test of the walking mechanism's ability to lift things of substantial weight. The idea of the robot is to have as heavy of a weapon as possible, so being able to lift 5-6 pounds would be good for the reliability of drive train during fights. In this video, you can hear a clicking noise as the robot is attempting to lift off the ground. This is due to a skipping of the gears, which shouldn't be happening due to the exact tolerance of the gear meshing in the design.

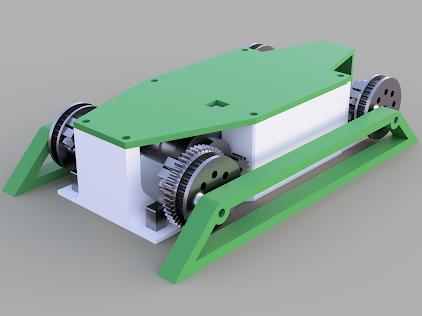
The Gearing Of The Drive Motor To The Pulley
In future tests I noticed the issue was a corner between the electronics housing and the base of the chassis. As the gears encountered any stress the corner would turn into a joint and would bend enough that the gears would separate, losing all torque and causing the clicking noise. By thickening up this corner (and possibly making the base thicker) this issue will be removed and the robot should be able to lift enough weight to enable the weapon to be placed on top.
That's all for this update on the walking mechanism. Once the belts arrive I will do a small update which will include the design and testing of a simple steering mechanism.

Comments
Post a Comment