UFO JOE: The First Steps

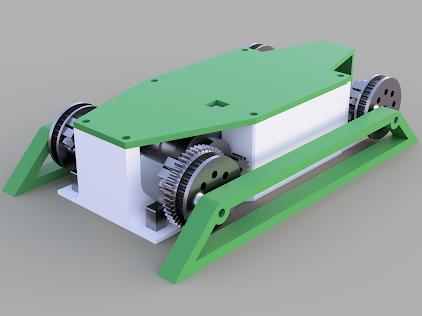
3D Printed Chassis and Walking Mechanism After receiving all the mechanical parts from ServoCity and 3D printing the chassis and legs I was ready to finally test the theory behind UFO JOE. If this walking mechanism worked it would mean that I could finally start to properly design the full body spinner. Now this wouldn't be a perfect demonstration of the walking mechanism, as the drive motor needs to be exchanged for a brushless system, and the front and back legs need to be linked with pullies. I will go over how these affected the walking later in the post. For more details on the walking mechanism check out my last post on UFO JOE. UFO JOE Takes It's First Steps In the video you can see that the mechanism worked... mostly . This aspect of the drive is only meant to move the robot forwards and backwards, and that works almost perfectly. While it may appear slow, the speed of the walking isn't the focus, the torque is. ...